测量助手窗口
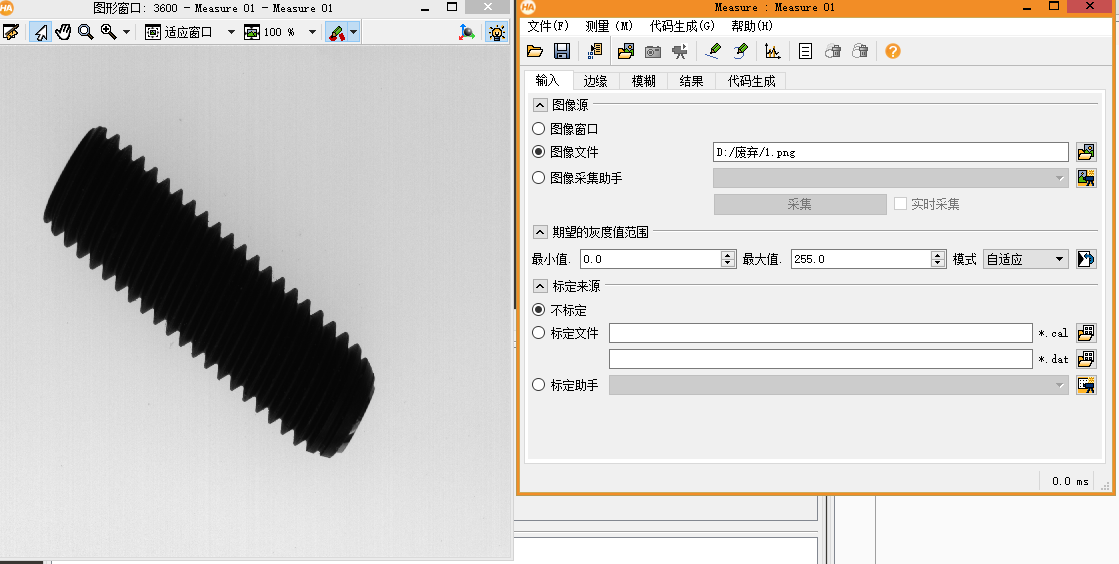
图像源
1.图像窗口
halcon窗口中已经有图片了就选这个
2.图像文件
选择一张图片
3.图像采集助手
打开相机采集图片
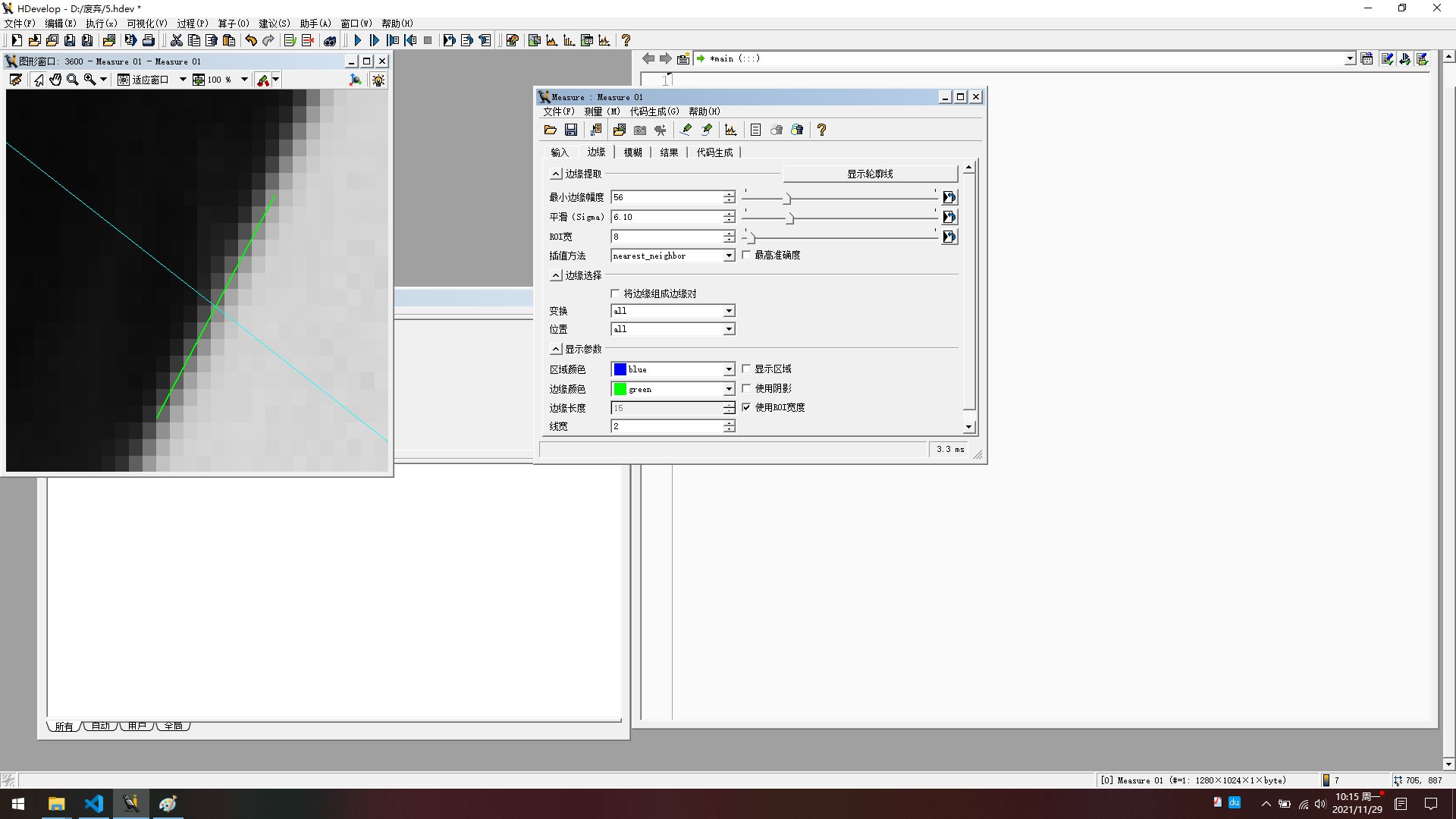
最小边缘幅度: 就是边缘的锯齿度
平滑:调节这个参数控制绿线往里面还是外面
ROI宽:调节绿线的长度
边缘由暗到亮为正向,边缘由亮到暗为负向
显示轮廓线
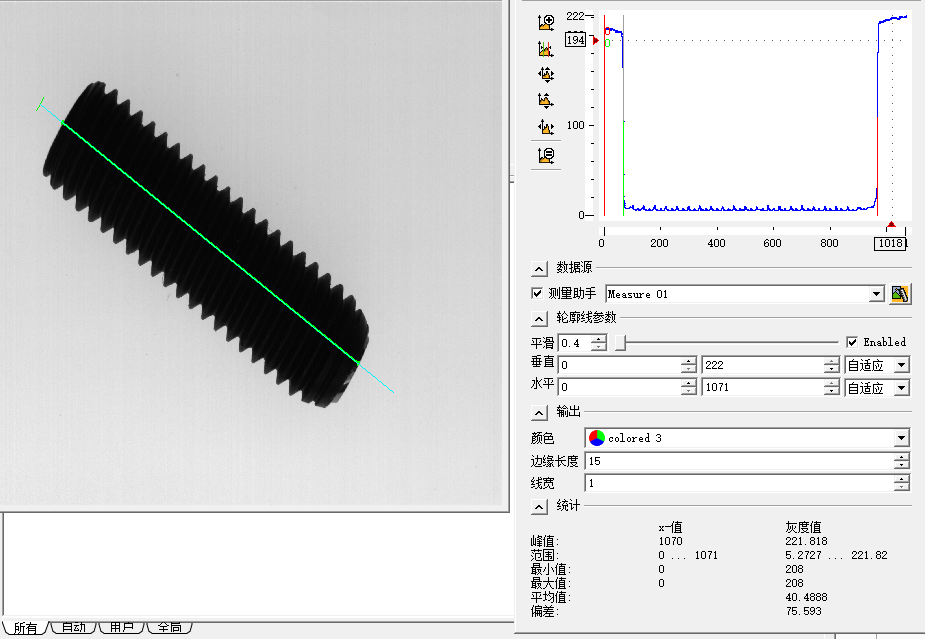
Y方向是像素值,X方向是像素
第一个陡坡像素值从200多降到十几,所用是第一个边缘,第二个陡坡从十几上升到200多,说明是第二个边缘。
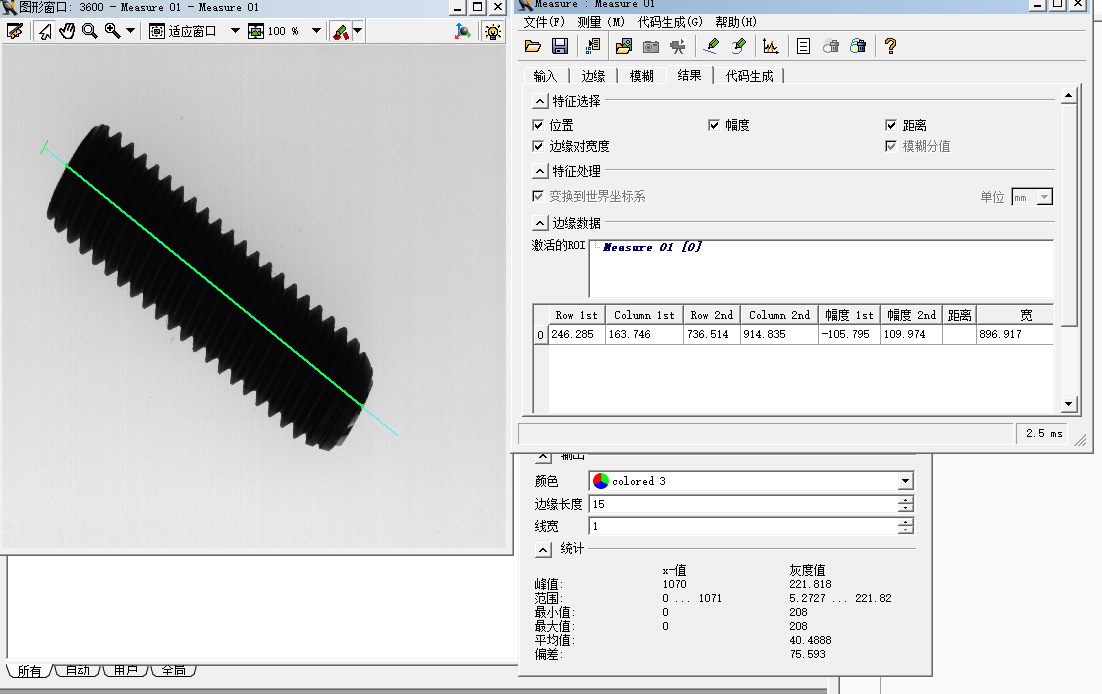
对于结果,第一个点是负向边缘点多坐标,第二个点是正向边缘点的坐标,宽就是芯片的长度。
代码
- Code generated by Measure 01
- Prepare measurement
AmplitudeThreshold := 40
ROIWidth := 5
set_system (‘int_zooming’, ‘true’) - Coordinates for line Measure 01 [0]
LineRowStart_Measure_01_0 := 208.77
LineColumnStart_Measure_01_0 := 106.167
LineRowEnd_Measure_01_0 := 793.913
LineColumnEnd_Measure_01_0 := 1002.67 - Convert coordinates to rectangle2 type
TmpCtrl_Row := 0.5*(LineRowStart_Measure_01_0+LineRowEnd_Measure_01_0)
TmpCtrl_Column := 0.5*(LineColumnStart_Measure_01_0+LineColumnEnd_Measure_01_0)
TmpCtrl_Dr := LineRowStart_Measure_01_0-LineRowEnd_Measure_01_0
TmpCtrl_Dc := LineColumnEnd_Measure_01_0-LineColumnStart_Measure_01_0
TmpCtrl_Phi := atan2(TmpCtrl_Dr, TmpCtrl_Dc)
TmpCtrl_Len1 := 0.5sqrt(TmpCtrl_DrTmpCtrl_Dr + TmpCtrl_Dc*TmpCtrl_Dc)
TmpCtrl_Len2 := ROIWidth - Create measure for line Measure 01 [0]
- Attention: This assumes all images have the same size!
gen_measure_rectangle2 (TmpCtrl_Row, TmpCtrl_Column, TmpCtrl_Phi, TmpCtrl_Len1, TmpCtrl_Len2, 1280, 1024, ‘nearest_neighbor’, MsrHandle_Measure_01_0)
- The code which follows is to be executed once / measurement *
- Load image
read_image (Image, ‘D:/废弃/1.png’) - Execute measurements
measure_pairs (Image, MsrHandle_Measure_01_0, 1, 40, ‘all’, ‘all’, Row1_Measure_01_0, Column1_Measure_01_0, Amplitude1_Measure_01_0, Row2_Measure_01_0, Column2_Measure_01_0, Amplitude2_Measure_01_0, Width_Measure_01_0, Distance_Measure_01_0) - Do something with the results
- Clear measure when done
close_measure (MsrHandle_Measure_01_0)



