Region
‘area’: 面积
‘row’: 中心的行坐标
‘column’: 中心的列坐标
‘width’: 区域的宽度(平行于坐标轴)
‘height’: 区域的高度(平行于坐标轴)
‘row1’: 左上角的行坐标
‘column1’: 左上角的列坐标
‘row2’: 右下角的行坐标
‘column2’: 右下角的列坐标
‘ra’; 椭圆的长半轴
‘rb’; 椭圆的短半轴
‘phi’; 椭圆的方向
‘roundness’:轮廓形状因子

‘num_sides’:多边形的边数
‘connect_num’:连通组件的数目
‘holes_num’:孔的数目
‘area_holes’:对象的孔的数目
‘max_diameter’:区域的最大直径
‘orientation’:区域的方向
‘outer_radius’:最小外接圆的半径
‘inner_radius’:最大内圆的半径
‘inner_width’: 区域内最大矩形的宽度
‘inner_height’:区域内最大矩形的高度
‘circularity’:
F:区域的面积;max是轮廓上的所有像素到中心的距离(最大距离),C = min(1,C’)
‘compactness’:紧密度,材料体内固体物质充实的程度叫紧密度
‘contlength’:轮廓的长度
‘convexity’:凸度
‘rectangularity’:矩形度
‘anisometry’:等效椭圆的轴比
‘bulkiness:’

‘struct_factor:’

‘dist_mean’:区域边框到中心的平均距离
‘dist_deviation:’:区域边框到中心距离偏差
‘euler_number’:欧拉数,最通常的空间完整性,即空洞区域内空洞数量的度量,测量法称为欧拉函数,它只用一个单一的数描述这些函数,称为欧拉数。
‘rect2_phi’: 最小外界矩形的方向
‘rect2_len1’:最小外接矩形的半长
‘rect2_len2’:最小外接矩形半宽
几何矩:图像区域的几何特征
零阶矩 m00反映了目标图像的面积。
一阶矩 反映了目标图像的质心位置。
二阶矩 又称惯性矩。
三阶矩 主要表现了目标对其均值分布偏差的一种测度,即扭曲度。
四阶矩 在统计学中用于描述一个分布的峰态
代码
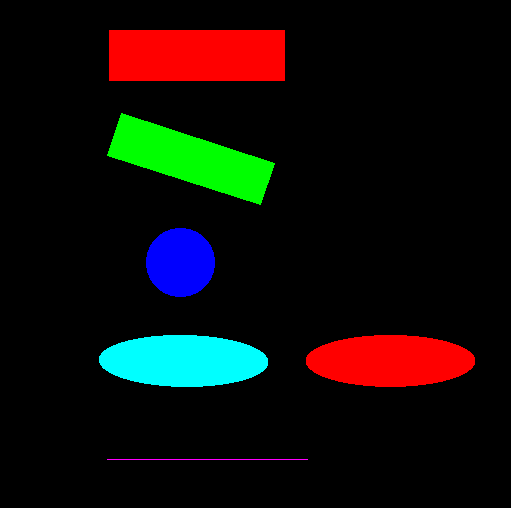
dev_open_window(0, 0, 512, 512, ‘black’, WindowHandle)
gen_rectangle1(ROI_Rectangle1, 31.18, 108.97, 81.25, 284.15)
gen_rectangle2(ROI_Rectangle2, 159.81, 190.50, rad(-17.92), 80.29, 21.73)
gen_circle(ROI_circle, 263.11, 180.24, 34.78)
gen_ellipse(ROI_ellipse, 361.96, 183.09, rad(-0.86), 84.39, 25.95)
gen_ellipse(ROI_ellipse1, 361.96, 390, rad(0), 84.39, 25.95)
gen_region_line(ROI_line, 459.54, 107.259, 460.173, 306.814)
union2(ROI_Rectangle1, ROI_Rectangle2, RegionUnion)
union2(RegionUnion, ROI_circle, RegionUnion)
union2(RegionUnion, ROI_ellipse, RegionUnion)
union2(RegionUnion, ROI_line, RegionUnion)
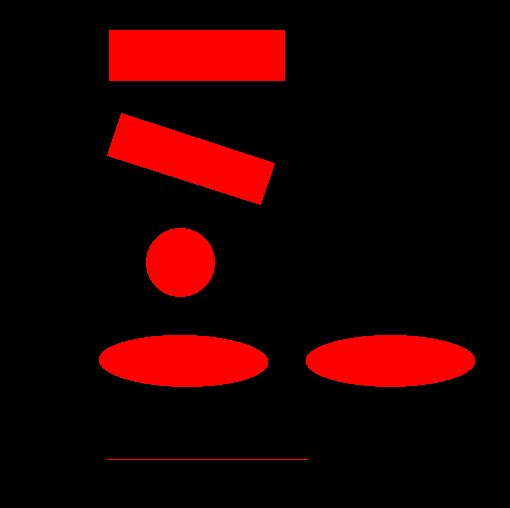
connection(RegionUnion, ConnectedRegions)//相邻区域联合,不相邻区域分开
dev_display(ConnectedRegions)
select_shape(ConnectedRegions, SelectedRegions, ‘area’, ‘and’, 8000, 99999)//通过面积选取特定区域
select_shape(ConnectedRegions, SelectedRegions, ‘roundness’, ‘and’, 0.8, 1)//通过轮廓形状因子选取特定区域
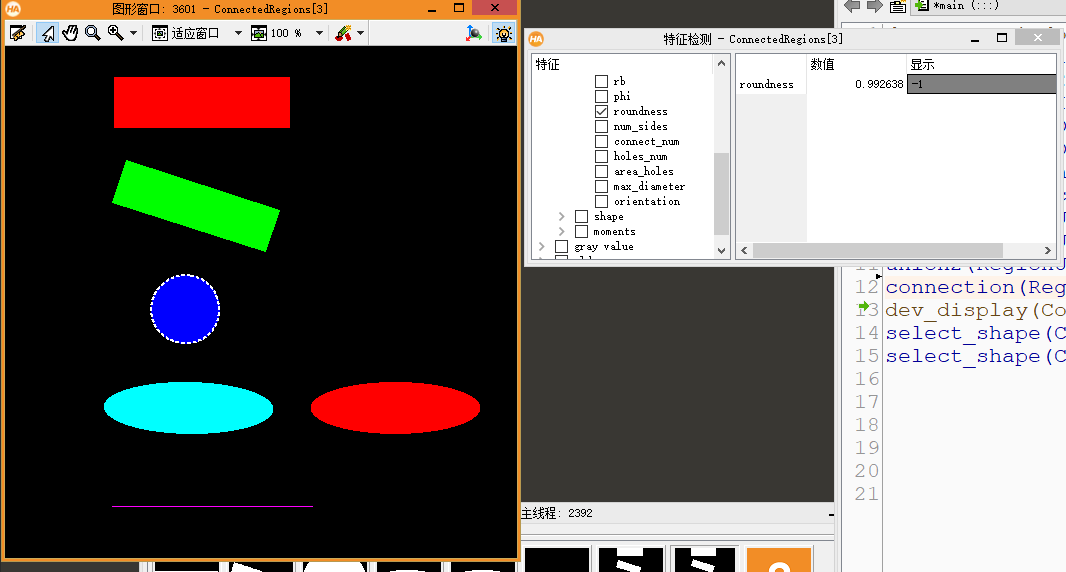
通过特征检测助手确定因子参数,将圆选取出来